









Pilote de moteur haute puissance Pololu Dual G2 18v18 pour raspberry pi (assemblé)
La description Liens Pièces jointes
Cette carte d'extension permet de contrôler facilement deux moteurs à courant continu haute puissance avec un raspberry pi . Ses deux ponts en H MOSFET discrets prennent en charge une large plage de fonctionnement de 6,5 V à 30 V et sont suffisamment efficaces pour fournir un courant continu de 18 A sans dissipateur thermique. Les pilotes offrent une fonctionnalité de limitation de courant de base et acceptent les fréquences PWM ultrasoniques pour un fonctionnement plus silencieux. Les mappages de broches par défaut facilitent le démarrage, mais ils peuvent être personnalisés pour des applications plus spécialisées. Cette version est livrée entièrement assemblée avec des connecteurs soudés.
La tension de fonctionnement minimale pour les quatre versions est de 6,5 V, tandis que les tensions de fonctionnement maximales sont indiquées dans le tableau ci-dessus. La carte comprend également un régulateur abaisseur à découpage intégré de 5 V, 2,5 A qui peut être utilisé pour alimenter le raspberry pi il est branché, permettant un fonctionnement à partir d'une seule alimentation.
La configuration par défaut du pilote utilise six broches GPIO pour contrôler les pilotes de moteur, en utilisant les sorties PWM matérielles du raspberry pi , et elle utilise deux broches supplémentaires pour lire les sorties d'état des pilotes. Cependant, les mappages de broches peuvent être personnalisés si les valeurs par défaut ne sont pas pratiques, et les broches pour la détection et la limitation de courant sont accessibles sur la carte pour des applications plus avancées.
La carte correspond à la spécification mécanique raspberry pi HAT (Hardware Attached on Top), bien qu'elle ne soit pas conforme aux spécifications HAT complètes en raison de l'absence d'EEPROM d'identification. (Une empreinte pour ajouter votre propre EEPROM est disponible pour les applications où une serait utile ; des pull-ups sur SDA, SCL et WP sont fournis.) Il n'est pas pratique d'utiliser cette carte d'extension avec le raspberry pi modèle A ou modèle d'origine. B en raison des différences de brochage et de facteur de forme.
Ces pilotes à double moteur sont également disponibles en tant que shields Arduino. Pour les versions à canal unique dans un facteur de forme plus compact, pensez à nos contrôleurs de moteur haute puissance. Pour des alternatives plus petites, moins puissantes et moins coûteuses conçues pour un raspberry pi , pensez à notre pilote de moteur double MC33926 pour raspberry pi , à notre pilote de moteur double MAX14870 pour raspberry pi et au pilote de moteur double DRV8835 pour raspberry pi .
Caractéristiques communes à toutes les versions
- Fonctionnement PWM jusqu'à 100 kHz
- Les voyants LED du moteur indiquent ce que font les sorties même lorsqu'aucun moteur n'est connecté
- Le régulateur de tension abaisseur de commutation intégré de 5 V, 2,5 A alimente la base raspberry pi pour un fonctionnement à alimentation unique
- Bibliothèque Python facilite l'utilisation de cette carte comme carte d'extension de pilote de moteur
- Les mappages de broches GPIO peuvent être personnalisés si les mappages par défaut ne sont pas pratiques
- Les broches de détection et de limitation de courant sont exposées pour une utilisation avancée
- Protection contre les inversions de tension
- Arrêt en cas de sous-tension
- Protection de court circuit
Détails pour cet article #3751
- Tension de fonctionnement : 6,5 V à 30 V (maximum absolu ; non destiné à être utilisé avec des batteries 24 V)
- Courant de sortie : 18 A continu
- Limitation de courant actif (hachage) avec seuil par défaut approximatif de 50 A (réglable plus bas)
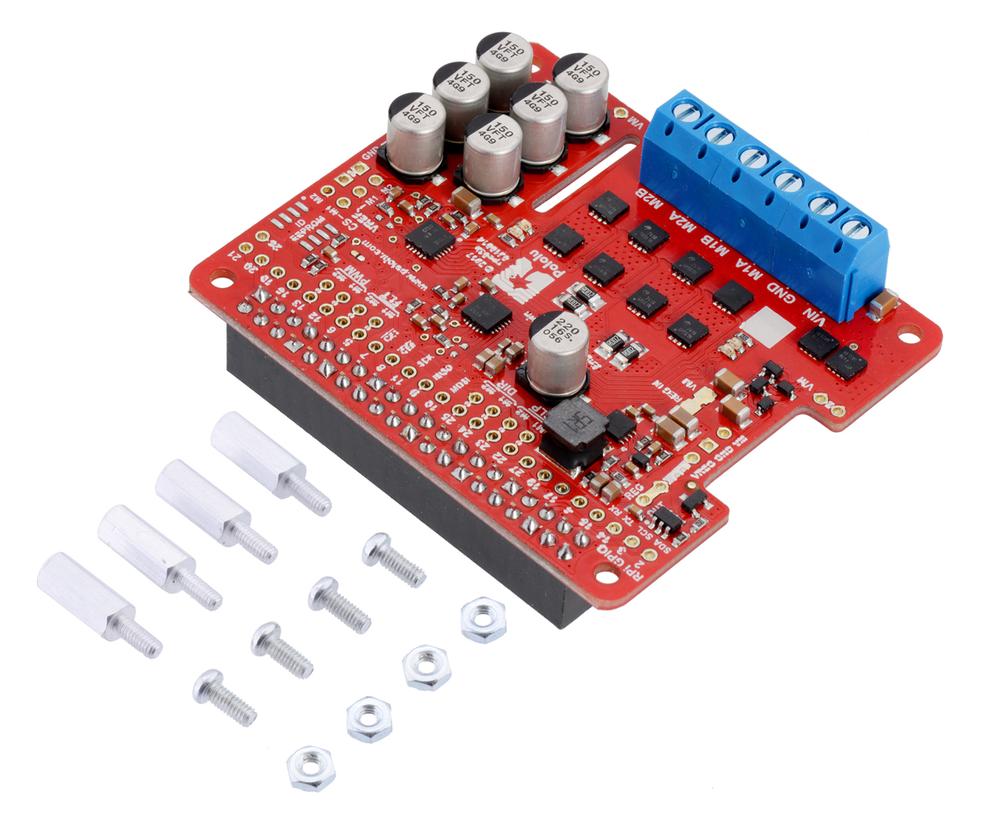
Cette version du 18v18 conducteur de moteur est entièrement assemblé, avec un en-tête femelle 2 × 20 broches 0,1 "(pour l'interface raspberry pi ) et une bande à six broches de borniers de 5 mm (pour l'alimentation de la carte et les sorties moteur) soudés. Il se distingue des autres versions par son rouge PCB et le nombre 150 au-dessus des six grands condensateurs électrolytiques argentés au coin de la carte. (Voir l'article #3750 pour une version en kit avec des connecteurs inclus mais non soudés.)
Quatre entretoises M2.5 (longueur de 11 mm), des vis et des écrous sont inclus pour fixer la carte au raspberry pi à la bonne hauteur pour le connecteur GPIO.
Des blocs de court-circuit et des en-têtes mâles de 0,1″ (non inclus) peuvent être utilisés pour apporter certaines des modifications optionnelles les plus avancées à la carte, telles que le remappage des broches de contrôle.
Le pilote de moteur comprend six condensateurs de puissance électrolytiques de 100 μF ou 150 μF, et il est possible d'ajouter des condensateurs supplémentaires (par exemple pour compenser les longs câbles d'alimentation ou augmenter la stabilité de l'alimentation). Des condensateurs de puissance supplémentaires ne sont généralement pas nécessaires et aucun condensateur supplémentaire n'est inclus avec ce pilote de moteur.
Un raspberry pi est non inclus.
Du pouvoir
Une alimentation de moteur appropriée doit être connectée aux grands plots VIN et GND du pilote de moteur. La carte comprend un circuit de protection contre les inversions de tension qui aide à prévenir les dommages au cas où l'alimentation du moteur serait connectée à l'envers. La tension d'entrée protégée contre l'inversion est accessible pour une utilisation dans d'autres circuits via les deux broches marquées VM sur le côté gauche de la carte. Par défaut, l'alimentation du moteur alimente également un régulateur abaisseur à découpage de 5 V, 2,5 A qui alimente le raspberry pi connecté.
Un circuit de diode idéal sur cette carte empêche le courant inverse de circuler dans l'alimentation 5 V de la carte de commande du moteur si le raspberry pi est alimenté séparément (par exemple, via sa prise d'alimentation USB). Cependant, à partir du raspberry pi 3 modèle B+, il n'y a pas de circuit de diode idéal correspondant sur l'entrée d'alimentation USB du raspberry pi , il est donc possible que la carte pilote rétro-alimente un adaptateur d'alimentation USB via le raspberry pi . Par conséquent, nous ne recommandons pas de connecter une alimentation USB externe au raspberry pi lorsqu'il est alimenté par le pilote du moteur.
Le retour d'alimentation n'est pas un problème avec les anciennes versions de raspberry pi , qui ont un circuit de diode sur l'entrée d'alimentation USB. Avec les versions raspberry pi Pi antérieures au Pi 3 B+, il est sûr d'avoir une alimentation différente connectée au raspberry pi Pi via sa prise USB pendant que le pilote du moteur est connecté et alimenté.
Si vous souhaitez alimenter le raspberry pi séparément, le régulateur peut être déconnecté en coupant deux traces exposées sur la carte : une entre les plots de montage en surface étiquetés « VM » et « REG IN », et une autre entre les deux broches par le « REG OUT », comme illustré à droite. Sur les versions 24v14 et 24v18, la déconnexion du régulateur augmente la tension maximale absolue de fonctionnement de la carte à 40 V.
Options de contrôle du moteur
Avec la broche PWM maintenue basse, les deux sorties moteur seront maintenues basses (une opération de freinage). Avec PWM élevé, les sorties du moteur seront pilotées en fonction de l'entrée DIR. Cela permet deux modes de fonctionnement : amplitude de signe, dans lequel le rapport cyclique PWM contrôle la vitesse du moteur et DIR contrôle la direction, et antiphase verrouillée, dans lequel un signal modulé en largeur d'impulsion est appliqué à la broche DIR avec PWM maintenu élevé.
En fonctionnement antiphase verrouillé, un rapport cyclique faible entraîne le moteur dans un sens et un rapport cyclique élevé entraîne le moteur dans l'autre sens; un cycle de service de 50 % arrête le moteur. Une mise en œuvre réussie de l'antiphase verrouillée dépend de l'inductance du moteur et de la fréquence de commutation qui lissent le courant (par exemple, rendre le courant nul dans le cas d'un cycle de service de 50 %), de sorte qu'une fréquence PWM élevée peut être nécessaire.
Fréquence PWM
Le pilote de moteur prend en charge des fréquences PWM aussi élevées que 100 kHz, mais notez que les pertes de commutation dans le pilote seront proportionnelles à la fréquence PWM. En règle générale, environ 20 kHz est un bon choix pour un fonctionnement à amplitude de signe car il est suffisamment élevé pour être ultrasonique, ce qui se traduit par un fonctionnement plus silencieux.
Une impulsion sur la broche PWM doit être élevée pendant une durée minimale d'environ 0,5 µs avant que les sorties ne s'allument pendant la durée correspondante (toute impulsion d'entrée plus courte ne produit pas de changement sur les sorties), de sorte que les cycles de service faibles deviennent indisponibles aux hautes fréquences . Par exemple, à 100 kHz, la période d'impulsion est de 10 µs et le rapport cyclique minimal non nul réalisable est de 0,5/10, soit 5 %.
Conditions de défaut
Le pilote du moteur peut détecter plusieurs états de défaut qu'il signale en amenant la broche FLT au niveau bas ; il s'agit d'une sortie à drain ouvert qui doit être tirée jusqu'à la tension logique de votre système. Les défauts détectables incluent les courts-circuits sur les sorties, la sous-tension et la surchauffe. Tous les défauts désactivent les sorties du moteur mais ne sont pas verrouillés, ce qui signifie que le pilote tentera de reprendre le fonctionnement lorsque la condition de défaut est supprimée (ou après un délai de quelques millisecondes dans le cas du défaut de court-circuit). Le défaut de surchauffe fournit une faible indication que la carte est trop chaude, mais il n'indique pas directement la température des MOSFET, qui sont généralement les premiers composants à surchauffer, vous ne devez donc pas compter sur ce défaut pour éviter les dommages dus à une surchauffe. -conditions de température.
Remappage des broches
Toutes les broches GPIO du raspberry pi Pi sont réparties le long d'une rangée de trous traversants numérotés juste en dessous du connecteur GPIO à 40 broches. Chaque broche GPIO utilisée par la carte est connectée à partir de cette rangée à la broche de pilote de moteur correspondante par une trace sur le côté supérieur de la carte couvrant la paire de trous. Si vous souhaitez remapper l'une de ces broches de pilote de moteur, vous pouvez couper sa trace avec un couteau, puis faire passer un fil du trou inférieur à une nouvelle broche GPIO.
Notez que les mappages de broches par défaut ont été choisis de sorte que les pull-ups et pull-downs GPIO par défaut du raspberry pi Pi correspondent à la direction dans laquelle les broches du pilote de moteur sont ou doivent être tirées (vers le haut pour SF, vers le bas pour les autres) ; Si vous remappez les broches du pilote de moteur sans y prêter attention, vous risquez de rencontrer des problèmes avec les broches tirées dans le mauvais sens. Voir le Documentation raspberry pi pour en savoir plus sur les états GPIO par défaut.
Détection et limitation de courant
Le pilote de moteur expose des broches de détection et de limitation de courant qui ne sont pas connectées au raspberry pi , mais elles sont accessibles par leurs propres trous traversants au cas où vous voudriez les utiliser dans une application plus avancée.
Le pilote a la capacité de limiter le courant du moteur par hachage de courant : une fois que le courant de commande du moteur atteint un seuil défini, le pilote passe en mode de freinage (décroissance lente) pendant environ 25 μs avant de remettre sous tension pour entraîner le moteur. Cela rend plus pratique l'utilisation du pilote avec un moteur qui peut ne consommer que quelques ampères pendant le fonctionnement, mais qui peut consommer plusieurs fois cette quantité (des dizaines d'ampères) au démarrage.
Sur cette carte (18v18), le seuil de limitation du courant nominal est fixé à environ 50 A par défaut. Pour chaque canal moteur, vous pouvez abaisser la limite en connectant une résistance supplémentaire entre la broche VREF et la broche GND adjacente ; le graphique ci-dessous montre comment la limite de courant est liée à la valeur de la résistance VREF. Par exemple, l'ajout d'une résistance de 100 kΩ entre VREF et GND abaisse la limite de courant à environ 29 A. Notez que le seuil de limitation de courant n'est pas très précis et est moins précis à des réglages particulièrement bas (indiqué par la partie en pointillé de la courbe) .
Les broches de détection de courant du pilote, étiquetées CS, produisent des tensions proportionnelles aux courants du moteur pendant que les ponts en H sont en train de conduire. La tension de sortie pour cette version est d'environ 20 mV/A plus un petit décalage, qui est généralement d'environ 50 mV.
Chaque sortie CS n'est active que lorsque le pont en H correspondant est en mode entraînement ; il est inactif (bas) lorsque le canal est en mode freinage (décroissance lente), ce qui se produit lorsque l'entrée PWM est basse ou lorsque la limitation de courant est active. Le courant continuera de circuler dans le moteur lorsque le conducteur commencera à freiner, mais la tension sur la broche CS ne reflétera pas avec précision le courant du moteur en mode freinage. La tension CS est utilisée en interne par le pilote du moteur, donc pour éviter d'interférer avec le fonctionnement du pilote, vous ne devez pas ajouter de condensateur à cette broche ou connecter une charge qui en tire plus de quelques mA.
Considérations sur la dissipation de puissance dans le monde réel
Les MOSFET peuvent gérer de grandes pointes de courant pendant de courtes durées (par exemple 100 A pendant quelques millisecondes), et le hachage de courant du pilote maintiendra le courant moyen sous la limite définie. Les valeurs nominales maximales sont pour les transitoires rapides (par exemple lorsqu'un moteur est mis en marche pour la première fois) et la valeur nominale continue dépend de diverses conditions, telles que la température ambiante. PWMing le moteur introduira un chauffage supplémentaire proportionnel à la fréquence. Le courant réel que vous pouvez fournir dépendra de votre capacité à maintenir le pilote du moteur au frais. La carte de circuit imprimé du pilote est conçue pour extraire la chaleur des MOSFET, mais les performances peuvent être améliorées en ajoutant un dissipateur thermique ou un flux d'air. Pour les installations à courant élevé, les fils du moteur et de l'alimentation doivent également être soudés directement au lieu de passer par les borniers fournis, qui sont conçus pour jusqu'à 16 A.
Avertissement: Ce pilote de moteur n'a pas d'arrêt en cas de surchauffe. Une condition de surchauffe ou de surintensité peut provoquer dommage permanent au conducteur du moteur. Vous pouvez envisager d'utiliser la sortie de détection de courant intégrée du pilote (avec un ADC externe) ou un capteur de courant externe pour surveiller votre consommation de courant.
Propriétés
| Marque | Pololu |
| Modèle | 3751 |
Délai de livraison 5 à 14 jours ouvrables
 Pilote de moteur haute puissance Pololu Dual G2 18v18 pour raspberry pi (assemblé) € 83,65
Pilote de moteur haute puissance Pololu Dual G2 18v18 pour raspberry pi (assemblé) € 83,65 Produits similaires
- Pilote de moteur haute puissance Pololu Dual G2 18v18 pour Raspberry Pi (kit partiel) € 78,10 Voir le produit
- Pololu Contrôleur de moteur simple haute puissance G2 18v25 € 184,25 Voir le produit
- Shield 18v18 Driver Moteur Haute Puissance Pololu Dual G2 pour Arduino € 83,65 Voir le produit
- Shield 24v18 Driver Moteur Haute Puissance Pololu Dual G2 pour Arduino € 117,15 Voir le produit
- Pilote de moteur haute puissance Pololu Dual G2 18v22 pour Raspberry Pi (kit partiel) € 106,- Voir le produit
- Pololu Contrôleur de moteur USB Jrk G2 21v3 avec retour (connecteurs soudés) € 63,55 Voir le produit
- Shield 18v22 pour pilote de moteur haute puissance Pololu Dual G2 pour Arduino € 117,15 Voir le produit
- Pololu Contrôleur de moteur USB Jrk G2 18v27 avec retour € 167,35 Voir le produit
- Contrôleur de moteur haute puissance Pololu G2 18v25 € 63,55 Voir le produit
- Pololu Contrôleur de moteur simple haute puissance G2 24v12 € 150,70 Voir le produit
- Pololu Contrôleur de moteur simple haute puissance G2 18v15 (connecteurs soudés) € 157,60 Voir le produit
- Pololu Contrôleur de moteur USB Jrk G2 18v19 avec retour € 122,70 Voir le produit
- Shield 24v14 Driver Moteur Haute Puissance Pololu Dual G2 pour Arduino € 89,25 Voir le produit
- Contrôleur de moteur haute puissance Pololu Dual G2 24v14 pour raspberry pi (Kit partiel) € 83,65 Voir le produit
- Pololu Contrôleur de moteur haute puissance G2 24v13 € 50,20 Voir le produit
- Pilote de moteur haute puissance Pololu Dual G2 24v18 pour Raspberry Pi (Kit partiel) € 106,- Voir le produit
- Contrôleur de moteur haute puissance Pololu G2 24v21 € 63,55 Voir le produit
- Pololu Contrôleur de moteur simple haute puissance G2 24v19 € 184,25 Voir le produit
- Pololu Contrôleur de moteur simple haute puissance G2 18v15 € 150,70 Voir le produit
- Pilote de moteur haute puissance Pololu Dual G2 24v14 pour Raspberry Pi (assemblé) € 89,25 Voir le produit
- Pololu Contrôleur de moteur USB Jrk G2 24v13 avec retour € 122,70 Voir le produit
- Contrôleur de moteur haute puissance Pololu G2 18v17 € 50,20 Voir le produit
- Pololu Contrôleur de moteur simple haute puissance G2 24v12 (connecteurs soudés) € 157,55 Voir le produit
- Pololu Contrôleur de moteur USB Jrk G2 24v21 avec retour € 167,35 Voir le produit
Questions et réponses
Avis des clients
- En stock Roulette à bille Pololu avec bille en métal 3/8″ € 3,30 Voir le produit
- En stock Pololu Régulateur de tension abaisseur 5 V, 500 mA D24V5F5 € 10,- Voir le produit
- En stock Pololu DRV8838 Support de pilote de moteur CC à balais simple € 5,55 Voir le produit
- 3 pièces En stock Pololu Bornier sans vis : 3 broches, pas de 0,1 ″, entrée latérale (paquet de 3) € 2,85 Voir le produit
- En stock Pololu Régulateur de tension abaisseur 5 V, 3,4 A D30V30F5 € 22,30 Voir le produit
- En stock Régulateur de tension élévateur 3.3V Pololu U1V10F3 € 7,80 Voir le produit
- En stock Pololu Décaleur de niveau logique, 4 canaux, bidirectionnel € 3,90 Voir le produit
- En stock Régulateur de tension élévateur 5V Pololu U1V10F5 € 7,80 Voir le produit
- En stock Pololu Interrupteur à action instantanée avec levier à galet de 16,3 mm : 3 broches, SPDT, 5 A € 2,80 Voir le produit
- En stock Pololu Buzzer électromagnétique de 9 mm : 40 Ω, 4-6 V, ouverture supérieure € 2,20 Voir le produit
- 2 pièces En stock Pololu Bornier sans vis : 6 broches, pas de 0,1 ″, entrée par le haut (paquet de 2) € 3,70 Voir le produit
- En stock Pololu Fil toronné : rouge, 28 AWG, 90 pieds € 11,10 Voir le produit
- Disparu = disparu En stock -73 % Pololu Régulateur de tension abaisseur 7,5 V, 600 mA D36V6F7 € 18,- € 4,80 Voir le produit
- En stock Pololu Fil toronné : blanc, 22 AWG, 50 pieds € 12,25 Voir le produit
- En stock Pololu Embase mâle détachable 0,100" (2,54 mm) : 1 × 40 broches, droite, blanche € 1,25 Voir le produit