









Capteur Sparkfun RedBot - Pare-chocs mécanique
La description Pièces jointes
Le capteur de pare-chocs mécanique est équipé d'un connecteur à trois broches. Cela permet une connexion directe à la carte mère RedBot à l'aide de câbles de raccordement femelle-femelle. Avec la bibliothèque RedBot, il est facile de programmer votre robot pour qu'il contourne efficacement les obstacles.
Il est important de noter que la plupart des didacticiels RedBot recommandent d'utiliser deux capteurs de pare-chocs mécaniques. Gardez cela à l’esprit lorsque vous décidez de la quantité de votre commande.
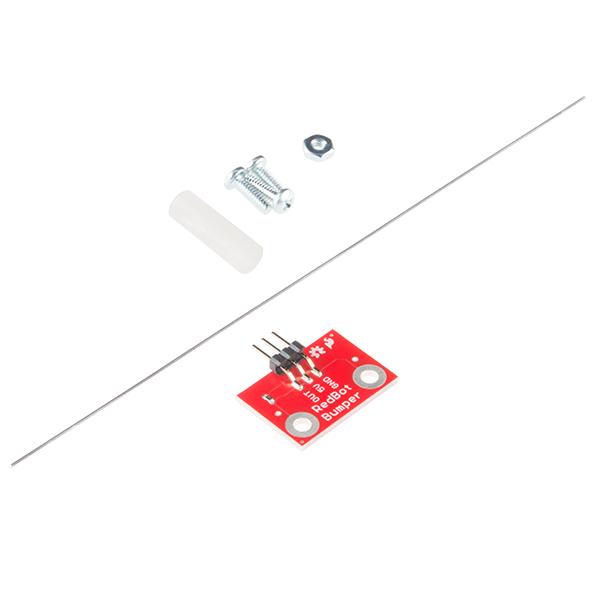
Le forfait comprend :
- Un panneau de pare-chocs mécanique
- Une moustache
- Une entretoise en nylon 4-40 de 19,05 mm
- Un écrou hexagonal 4-40
- Trois vis à métaux Phillips 4-40 de 9,53 mm
Le capteur de pare-chocs mécanique présente une taille compacte de 26,27 x 17,67 mm, ce qui en fait un ajustement parfait pour votre RedBot.
Pour des informations plus détaillées, vous pouvez accéder au schéma, aux fichiers Eagle, au RedBot Experiment Guide, au RedBot Shadow Chassis Assembly Guide et à GitHub à partir du site Web Sparkfun . Vous pouvez également regarder la vidéo du produit pour voir le capteur de pare-chocs mécanique en action.
Le capteur Sparkfun RedBot – pare-chocs mécanique est un petit ajout qui peut faire une grande différence dans les performances de votre robot. C'est un outil essentiel pour tout constructeur de robots cherchant à améliorer la navigation de son RedBot et à éviter les collisions potentielles.
Propriétés
| Marque | Sparkfun |
| Modèle | SEN-11999 |
| Plus d'information | GitHub - sparkfun/RedBot_Whisker_Bumper: Super-simple board to provide the RedBot with a mechanical whisker to detect collisions. |
| Longueur | 100 mm |
| Largeur | 130 mm |
| Hauteur | 7 mm |
| Poids | 14,2 g |
Délai de livraison 5 à 7 jours ouvrables
 Capteur Sparkfun RedBot - Pare-chocs mécanique Livré en 5 à 7 jours € 4,80
Capteur Sparkfun RedBot - Pare-chocs mécanique Livré en 5 à 7 jours € 4,80 Questions et réponses
Avis des clients
- Réduit En stock -40 % Sparkfun Connecteur Qwiic JST - SMD 4 broches (vertical) € 1,25 € 0,75 Voir le produit
- Réduit En stock -40 % Sparkfun Prise audio 3,5 mm € 2,50 € 1,50 Voir le produit
- Réduit En stock -40 % Sparkfun Support de pile - 1xAAA (PTH) € 0,75 € 0,45 Voir le produit
- Réduit En stock -40 % Sparkfun Kit d'en-têtes Raspberry Pi Pico € 2,25 € 1,35 Voir le produit
- Réduit En stock -40 % Sparkfun Level Shifting microSD Breakout € 8,95 € 5,40 Voir le produit
- Réduit En stock -40 % Sparkfun Kit d'en-tête empilable Arduino - R3 € 3,75 € 2,25 Voir le produit
- Réduit En stock -39 % Sparkfun Câble Qwiic Flexible - 200mm € 3,05 € 1,85 Voir le produit
- Réduit En stock -40 % Sparkfun Interrupteur à bascule - SPST (angle droit) € 1,75 € 1,05 Voir le produit
- Réduit En stock -40 % Sparkfun Arduino Pro Mini 328 - 5V/16MHz € 15,40 € 9,25 Voir le produit
- Réduit En stock -40 % Dérivation du capteur de ligne Sparkfun - QRE1113 (numérique) € 6,20 € 3,75 Voir le produit
- Réduit 2 pièces En stock -40 % Sparkfun Ensemble d'en-têtes empilables ESP32 Thing € 3,50 € 2,10 Voir le produit
- Réduit En stock -40 % Sparkfun Fil de branchement – Marron (22 AWG) € 5,25 € 3,15 Voir le produit
- Réduit En stock -40 % Sparkfun Fils de test crocodile - multicolores (paquet de 10) € 7,20 € 4,35 Voir le produit
- Réduit En stock -40 % Sparkfun Redresseur à diode - 1A, 50V (1N4001) € 0,50 € 0,30 Voir le produit
- Réduit En stock -40 % Sparkfun Micro 6DoF IMU Breakout - BMI270 (Qwiic) € 23,80 € 14,30 Voir le produit