









Adafruit Moteur CC N20 avec encodeur magnétique - 6 V, rapport de réduction 1:150
La description
La première étape d'un projet de robotique consiste à faire tourner un moteur, révélant ainsi les variations de vitesse dues à la tension, à l'environnement et aux différences de fabrication. Pour mesurer précisément la vitesse du moteur, on peut y fixer une roue codeuse, ainsi qu'un compteur optique ou magnétique. Cette combinaison permet au microcontrôleur de compter les rayons qui défilent et de déterminer efficacement la vitesse.
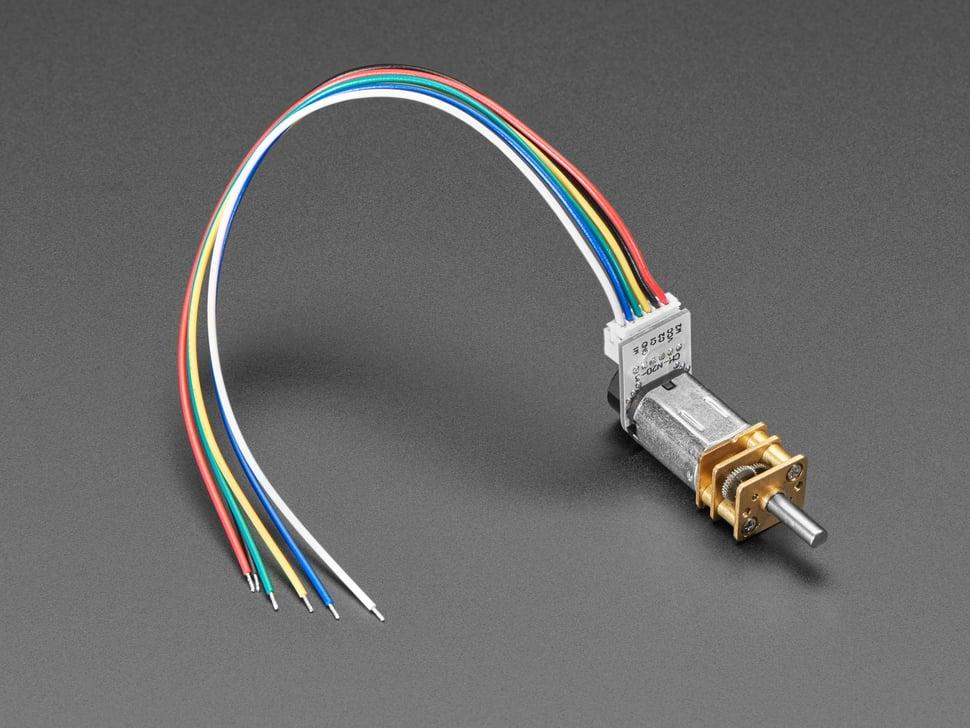
Améliorez votre installation en ajoutant un second compteur pour détecter la direction et la vitesse, et simplifiez le processus grâce à notre moteur spécialement conçu. Ce moteur, compact au format N20 standard, est équipé d'une roue magnétique et de deux capteurs à effet Hall pré-installés, garantissant une intégration parfaite.
Le moteur fonctionne de manière optimale avec une alimentation de 4,5 à 6 V CC via ses fils blanc et rouge, qui se connectent à votre contrôleur de moteur et permettent un réglage de la vitesse par modulation de largeur d'impulsion (PWM) à l'aide d'un pont en H. Connectez le fil bleu à la masse de votre microcontrôleur, alimentez le fil noir avec une tension de 3 à 5 V CC et mesurez les signaux des capteurs à effet Hall (fils jaune et vert) pour un retour d'information précis.
Un exemple de programme est disponible pour Arduino , adaptable à d'autres langages de programmation. Il utilise les interruptions sur les broches de l'encodeur pour calculer la vitesse. Ce moteur possède un rapport de réduction de 1:150, nécessite une alimentation nominale de 6 V et consomme environ 100 mA, avec des pics à 200 mA au blocage. Le rapport de réduction ajuste le couple et la vitesse de rotation sans incidence sur la consommation de courant, offrant ainsi une grande polyvalence d'utilisation.
Propriétés
| Marque | Adafruit |
| Modèle | 4640 |
ETA n'est pas connu
 Adafruit Moteur CC N20 avec encodeur magnétique - 6 V, rapport de réduction 1:150 € 15,65
Adafruit Moteur CC N20 avec encodeur magnétique - 6 V, rapport de réduction 1:150 € 15,65 Questions et réponses
Avis des clients
- 3 pièces En stock Adafruit Filament LED - 3 V, 26 mm de long - Blanc chaud (lot de 3) € 5,70 Voir le produit
- En stock Adafruit Capteurs infrarouges à faisceau brisé avec connecteurs de qualité supérieure - LED de 3 mm € 3,75 Voir le produit
- En stock Adafruit NOOds - Filament LED Flexible - 3V 300mm de long - Bleu € 9,45 Voir le produit
- En stock Amplificateur Adafruit I2S 3W Classe D Breakout - MAX98357A € 7,45 Voir le produit
- En stock Adafruit Support de pile bouton 2 x CR2032 - Sortie 6 V - Interrupteur marche/arrêt € 2,50 Voir le produit
- En stock Adafruit Interrupteur à glissière SPDT compatible avec la platine d'expérimentation € 1,25 Voir le produit
- En stock Adafruit Haut-parleur - 3" de diamètre - 4 Ohm 3 Watt € 2,50 Voir le produit
- En stock Adafruit NOOds - Filament LED Flexible - 3V 300mm de long - Blanc Chaud € 5,70 Voir le produit
- En stock Adafruit Feuille conductrice sensible à la pression (Velostat/Linqstat) € 6,20 Voir le produit
- En stock Amplificateur Audio Classe D Adafruit Mono 2.5W - PAM8302 € 5,- Voir le produit
- En stock Adafruit Module de rétroéclairage LED blanc - Petit 12 mm x 40 mm € 2,50 Voir le produit
- En stock Adafruit Module de rétroéclairage LED blanc - Moyen 23 mm x 75 mm € 3,25 Voir le produit
- En stock Adafruit Capteur de faisceau IR avec embouts de câble de qualité supérieure - LED 5 mm € 7,45 Voir le produit
- 5 pièces En stock Adafruit LED NeoPixel diffuse 5 mm traversante - Lot de 5 € 6,20 Voir le produit
- En stock Adafruit Chargeur PowerBoost 500 - Rechargeable 5V Lipo USB Boost @ 500mA+ € 18,60 Voir le produit