









Pololu Kit robot OLED Zumo 32U4 (sans moteurs)
La description Liens
Le robot Pololu Zumo 32U4 OLED est un robot à chenilles polyvalent basé sur le microcontrôleur ATmega32U4 compatible Arduino, et ce kit contient la plupart des pièces dont vous avez besoin pour en construire un. Il vous suffit d'ajouter une paire de micro-moteurs à engrenages métalliques et quatre piles AA. . Il comprend des pilotes de moteur double intégrés, un écran graphique OLED, des encodeurs en quadrature, des capteurs de ligne, des capteurs de proximité latéraux et avant et une IMU complète. Le robot assemblé mesure moins de 10 cm × 10 cm, suffisamment petit pour se qualifier pour le Mini Sumo. Ce produit est un kit ; l'assemblage (y compris la soudure) est nécessaire.
Aperçu
Le Zumo 32U4 OLED est un robot à chenilles hautement intégré, programmable par l'utilisateur et personnalisable. Il mesure moins de 10 cm de chaque côté et pèse environ 275 g avec piles (160 g sans), il est donc à la fois assez petit et assez léger pour se qualifier pour les compétitions de Mini-Sumo, mais sa polyvalence le rend capable de bien plus que juste combats de sumo de robots.
Au cœur du Zumo 32U4 se trouve un microcontrôleur ATmega32U4 AVR de Microchip (anciennement Atmel), et comme nos contrôleurs programmables A-Star 32U4, le Zumo 32U4 dispose d'une interface USB et est livré préchargé avec un chargeur de démarrage compatible Arduino. Un logiciel complémentaire est disponible pour faciliter la programmation du robot à partir de l'environnement Arduino, et nous avons des bibliothèques Arduino et des exemples de croquis pour vous aider à démarrer. Un câble USB A vers Micro-B (non inclus) est requis pour la programmation. Pour les utilisateurs avancés qui souhaitent personnaliser ou améliorer leurs robots avec des périphériques supplémentaires, les rails d'alimentation du robot et les lignes d'E/S du microcontrôleur sont accessibles via des trous traversants espacés de 0,1″ le long des côtés et à l'avant de la carte principale.
Le Zumo 32U4 comprend deux pilotes de moteur à pont en H et une variété de capteurs intégrés, y compris une paire d'encodeurs en quadrature pour le contrôle du moteur en boucle fermée, une unité de mesure inertielle complète (accéléromètre à 3 axes, gyroscope et magnétomètre), cinq vers le bas- des capteurs de réflexion orientés vers l'avant pour le suivi de ligne ou la détection des bords, et des capteurs de proximité orientés vers l'avant et les côtés pour la détection et la télémétrie d'obstacles. Trois boutons-poussoirs intégrés offrent une interface pratique pour la saisie de l'utilisateur, et un écran graphique OLED 128 × 64, un avertisseur sonore et des voyants lumineux permettent au robot de fournir des commentaires.
Le robot Zumo 32U4 OLED est disponible entièrement assemblé avec trois options de moteur différentes (voir la section Moteurs ci-dessous pour plus d'informations sur le fonctionnement de ces différents rapports de vitesse) :
- Assemblé avec des moteurs 50:1 HP — vitesse la plus élevée et couple le plus faible des trois options
- Assemblé avec des moteurs 75:1 HP — vitesse et couple moyens
- Assemblé avec des moteurs 100:1 HP — couple le plus élevé et vitesse la plus faible
Le robot Zumo 32U4 OLED est également disponible en kit (sans moteurs) pour ceux qui préféreraient le monter eux-mêmes ou qui voudraient utiliser des moteurs différents de ceux des trois versions assemblées.
Détails pour l'article #4990
Cette version du robot Zumo 32U4 OLED (article #4990) est un trousse; l'assemblage (y compris la soudure) est nécessaire. Les moteurs et les batteries sont vendus séparément. Un câble USB A vers Micro-B (non inclus) est requis pour la programmation.
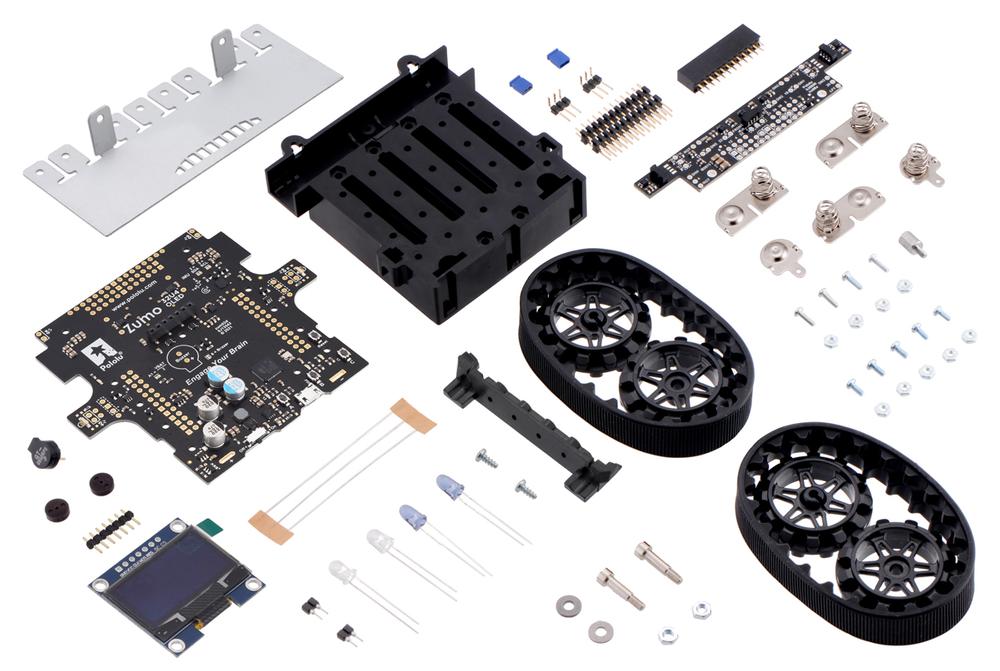
Contenu du kit
À l'exception des moteurs, des batteries et d'un câble USB A vers Micro-B, ce kit contient tout le nécessaire pour construire et faire fonctionner un robot Zumo 32U4 :
- Kit de châssis Zumo
- Carte principale Zumo 32U4 OLED (cela comprend deux disques d'encodeur magnétique qui fonctionnent avec des capteurs d'encodeur intégrés dans la carte principale et un buzzer traversant)
- Matrice de capteurs avant Zumo 32U4
- Lame Zumo 32U4 en acier inoxydable et support LED IR en plastique
- écran OLED graphique
Voir le Guide d'utilisation du robot Zumo 32U4 pour des instructions de montage détaillées.
C'est un plus récent Zumo 32U4 OLED Kit Robot avec écran graphique OLED. Pour son homologue de la version d'origine avec un écran LCD, voir le kit robot Zumo 32U4.
Moteurs (non inclus avec l'article #4990)
Le châssis Zumo utilise deux micro motoréducteurs métalliques, un pour chaque bande de roulement. Les moteurs idéaux pour votre robot dépendent du couple, de la vitesse et de la consommation de courant que vous souhaitez, de sorte que les moteurs ne sont pas inclus avec la version kit du châssis (les moteurs sont inclus avec les versions assemblées du robot Zumo 32U4). Nous recommandons généralement d'utiliser des versions haute puissance (HP ou HPCB, qui ont des balais de carbone longue durée) de nos micromoteurs à engrenages métalliques car les chenilles nécessitent une quantité décente de couple pour se déplacer efficacement ; des rapports de démultiplication plus élevés des moteurs non HP peuvent fonctionner si vous souhaitez une consommation de courant plus faible, mais ils seront plus lents et offriront moins de contrôle. Plus précisément, nous recommandons principalement les moteurs 50:1, 75:1 ou 100:1 HP (ou HPCB) à utiliser avec ce châssis, et ce sont les versions que nous incluons dans notre robot Zumo 32U4 assemblé. De plus, assurez-vous d'obtenir une version avec arbres moteur allongés si vous voulez pouvoir utiliser les encodeurs du Zumo 32U4.
Vous pouvez utiliser le tableau suivant pour comparer ces trois rapports de vitesse plus en détail. Les quatre premières colonnes sont les spécifications des moteurs eux-mêmes, tandis que la dernière colonne est la vitesse maximale mesurée d'un châssis Zumo chargé à un poids de 500 g et entraîné avec ces moteurs. Notez que les spécifications sont pour un fonctionnement à 6 V, ce qui correspond approximativement à la tension que vous obtiendriez avec quatre piles alcalines ; quatre piles AA NiMH fourniront généralement moins de 5V.
| Micro motoréducteur en métal | Vitesse de fonctionnement libre @ 6V | Couple de décrochage à 6 V | Courant de décrochage @ 6V | Top Zumo Speed@ 6V et 500g | |
|---|---|---|---|---|---|
| HP 50:1 ou HPCB 50:1 | 625 tr/min | 15 oz·po | 1600mA | 40 pouces/s | (100 cm/s) |
| HP 75:1 ou HPCB 75:1 | 400 tr/min | 22 oz·po | 1600mA | 25 po/s | (65 cm/s) |
| HP 100:1 ou HPCB 100:1 | 320 tr/min | 30 oz·po | 1600mA | 20 po/s | (50 cm/s) |
Piles (non incluses)
Le robot Zumo 32U4 fonctionne avec quatre piles AA. Il fonctionne avec des piles alcalines et NiMH, bien que nous vous recommandons d'utiliser des piles AA NiMH rechargeables.
Accessoires optionnels
- Encore plus de capteurs
- Connecteurs (en-têtes, fils de connexion, etc.) pour ajouter ces capteurs ou d'autres périphériques
- Outils (coupe diagonale, pinces, tournevis, etc.) pour aider à l'assemblage du kit
- Pignons de rechange en rouge ou blanc. Le robot Zumo 32U4 comprend les pignons noirs illustrés dans l'image de gauche ci-dessous, mais d'autres couleurs peuvent être achetées séparément si vous souhaitez ajouter un peu de personnalisation à votre robot.
Comparaison avec le kit robot Zumo pour Arduino (avec Zumo Shield)
Notre ancien robot Zumo pour Arduino, construit avec un bouclier Zumo, est une autre plate-forme robotique compatible Arduino basée sur le châssis Zumo. Le bouclier Zumo se monte sur le châssis Zumo et comporte des pilotes de moteur et divers capteurs, mais il n'a pas de microcontrôleur intégré ; il est plutôt conçu pour s'interfacer avec des cartes qui ont un facteur de forme Arduino standard, comme un Arduino Uno, Arduino Leonardo ou A-Star 32U4 Prime, et ces cartes servent de contrôleur principal pour le robot.
Propriétés
| Marque | Pololu |
| Modèle | 4990 |
Délai de livraison 5 à 7 jours ouvrables
 Pololu Kit robot OLED Zumo 32U4 (sans moteurs) Livré en 5 à 7 jours € 113,30
Pololu Kit robot OLED Zumo 32U4 (sans moteurs) Livré en 5 à 7 jours € 113,30 Produits similaires
- Réduit En stock -50 % Pololu Robot Zumo pour Arduino , v1.2 (assemblé avec des moteurs 75:1 HP) € 188,15 € 94,10 Voir le produit
- Pololu Carte mère Zumo 32U4 OLED € 99,90 Voir le produit
- Pololu Robot OLED Zumo 32U4 (assemblé avec des moteurs 75:1 HP) € 169,90 Voir le produit
- Pololu Kit de châssis Zumo (sans moteurs) € 32,70 Voir le produit
- Pololu Robot OLED Zumo 32U4 (assemblé avec des moteurs 100:1 HP) € 256,60 Voir le produit
- Pololu Robot OLED Zumo 32U4 (assemblé avec des moteurs 50:1 HP) € 256,60 Voir le produit
Produits connexes
- Réduit 12 pièces En stock -50 % Camelion Piles alcalines AA - 2800 mah - 12 pièces € 7,95 € 4,- Voir le produit
- 24 pièces Camelion Piles alcalines AA - 2800 mah - 24 pièces € 7,20 Voir le produit
- Pololu Lame Sumo de base pour châssis Zumo € 6,55 Voir le produit
- Pololu Pile rechargeable NiMH AA : 1,2 V, 2200 mAh, 1 cellule € 8,45 Voir le produit
- Pololu Matrice de capteurs de réflectance Zumo € 24,15 Voir le produit
Questions et réponses
Avis des clients
- Réduit En stock -50 % Régulateur de tension élévateur 3.3V Pololu U1V10F3 € 9,70 € 4,85 Voir le produit
- Réduit En stock -50 % Paire de roues Pololu 32×7mm - Blanc € 6,25 € 3,10 Voir le produit
- Réduit En stock -50 % Régulateur de tension élévateur 3.3V Pololu U1V11F3 € 11,10 € 5,55 Voir le produit
- Réduit En stock -50 % Pololu Régulateur de tension élévateur/abaisseur 5V S18V20F5 € 41,80 € 20,90 Voir le produit
- Réduit En stock -50 % Pololu Régulateur de tension élévateur 5V U3V16F5 € 9,70 € 4,85 Voir le produit
- Réduit En stock -50 % Pololu Câble ruban Premium Jumper Wires 10 couleurs FF 6" (15 cm) € 4,- € 2,- Voir le produit
- Réduit 3 pièces En stock -49 % Pololu Bornier sans vis : 3 broches, pas de 0,1 ″, entrée latérale (paquet de 3) € 3,55 € 1,80 Voir le produit
- Réduit En stock -50 % Pololu Fil toronné : rouge, 28 AWG, 90 pieds € 13,90 € 6,95 Voir le produit
- Réduit En stock -50 % Régulateur de tension abaisseur 3,3 V, 500 mA Pololu D24V5F3 € 12,50 € 6,25 Voir le produit
- Réduit 5 pièces En stock -49 % Pololu Mini interrupteur à bouton-poussoir : montage sur circuit imprimé, 2 broches, SPST, 50 mA (paquet de 5) € 2,95 € 1,50 Voir le produit
- Réduit En stock -51 % Pololu Mini interrupteur à glissière : 3 broches, SPDT, 0,3 A (paquet de 3) € 3,35 € 1,65 Voir le produit
- Réduit En stock -50 % Pololu Régulateur de tension abaisseur 5 V, 500 mA D24V5F5 € 12,50 € 6,25 Voir le produit
- Réduit En stock -48 % Pololu Embase mâle détachable 0,100" (2,54 mm) : 1 × 40 broches, droite, blanche € 1,55 € 0,80 Voir le produit
- Réduit En stock -50 % Pololu Fil toronné : blanc, 20 AWG, 40 pieds € 16,70 € 8,35 Voir le produit
- Réduit En stock -50 % Régulateur de tension abaisseur 9V, 1A Pololu D24V10F9 € 18,05 € 9,05 Voir le produit