









Adafruit Moteur CC N20 avec encodeur magnétique - 6 V, rapport de réduction 1:298
La description
La première étape d'un projet de robotique consiste à faire tourner un moteur. La vitesse de rotation des moteurs varie en fonction de la tension, de l'environnement et des procédés de fabrication. Pour la déterminer, on utilise une roue codeuse équipée d'un compteur optique ou magnétique qui compte les rotations.
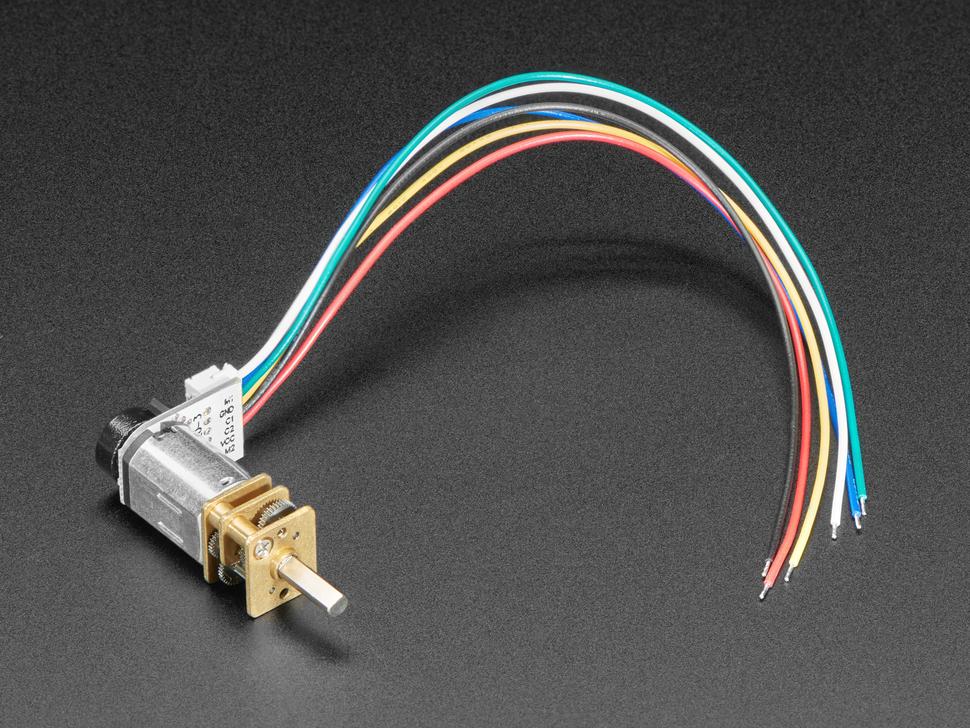
Ce moteur simplifie le processus grâce à sa roue magnétique intégrée et ses deux capteurs à effet Hall, éliminant ainsi un câblage complexe. Compact, il s'adapte au format standard N20 et fonctionne efficacement avec une tension continue de 4,5 à 6 V. Les connexions sont simples : fils blanc et rouge pour la commande du moteur, prise en charge PWM pour le réglage de la vitesse, fil bleu pour la masse et fil noir pour l'alimentation. Les fils jaune et vert fournissent les sorties de l'encodeur.
Un exemple de programme Arduino est disponible, adaptable à d'autres langages, pour le comptage des interruptions et le calcul de la vitesse avec un rapport de réduction de 1:298. Le moteur fonctionne sous une tension nominale de 6 V et consomme environ 100 mA (200 mA à l'arrêt). La variation du rapport de réduction influe sur le couple et le régime moteur, mais pas sur la consommation de courant.
Propriétés
| Marque | Adafruit |
| Modèle | 4641 |
Délai de livraison 10 à 12 jours ouvrables
 Adafruit Moteur CC N20 avec encodeur magnétique - 6 V, rapport de réduction 1:298 Livré en 10 à 12 jours € 19,35
Adafruit Moteur CC N20 avec encodeur magnétique - 6 V, rapport de réduction 1:298 Livré en 10 à 12 jours € 19,35 Questions et réponses
Avis des clients
- Réduit En stock -50 % Adafruit Module de rétroéclairage LED blanc - Petit 12 mm x 40 mm € 2,70 € 1,35 Voir le produit
- Réduit En stock -50 % Adafruit Carte de dérivation à angle droit CMS à 2 broches JST-PH € 2,10 € 1,05 Voir le produit
- Réduit En stock -50 % Adafruit Mini haut-parleur en métal avec fils - 8 ohm 0,5 W € 2,70 € 1,35 Voir le produit
- Réduit En stock -49 % Adafruit Connecteurs empilables pour Feather - Connecteurs femelles à 12 et 16 broches € 1,75 € 0,90 Voir le produit
- Réduit 3 pièces En stock -50 % Adafruit Filament LED - 3 V, 26 mm de long - Blanc chaud (lot de 3) € 6,30 € 3,15 Voir le produit
- Réduit En stock -50 % Adafruit Filament LED flexible avec une seule connexion - 3V 25 mm de long - Vert € 3,50 € 1,75 Voir le produit
- Réduit En stock -50 % Adafruit NOOds - Filament LED Flexible - 3V 300mm de long - Jaune € 10,35 € 5,20 Voir le produit
- Réduit En stock -50 % Carte d'extension GPS Ultimate Adafruit pour Raspberry Pi A+/B+/Pi 2/3/4/Pi 5 € 41,35 € 20,70 Voir le produit
- Réduit En stock -49 % Adafruit Jeu de câbles étanches polarisés à 4 fils € 3,45 € 1,75 Voir le produit
- Réduit En stock -50 % Adafruit Capteur de faisceau IR avec embouts de câble de qualité supérieure - LED 5 mm € 8,20 € 4,10 Voir le produit
- Réduit En stock -50 % Adafruit Haut-parleur - 3" de diamètre - 4 Ohm 3 Watt € 2,70 € 1,35 Voir le produit
- Réduit En stock -50 % Adafruit Jeu de câbles d'alimentation CC étanches - 5,5/2,1 mm € 3,50 € 1,75 Voir le produit
- Réduit En stock -50 % Adafruit NOOds - Filament LED Flexible - 3V 300mm de long - Rouge € 10,35 € 5,20 Voir le produit
- Réduit En stock -50 % Adafruit Tissu conducteur tissé - carré de 20 cm € 6,85 € 3,45 Voir le produit
- Réduit 10 pièces En stock -50 % Adafruit Embase mâle détachable 0,1" à 36 broches - Rainbow Combo 10 Pack € 6,85 € 3,45 Voir le produit