









Adafruit Carte de dérivation gyroscopique à trois axes L3GD20H - Mise à niveau L3GD20/L3G4200
La description
Un capteur gyroscopique capture les mouvements de torsion et de rotation, transformant ainsi la mesure du mouvement 3D et de la dynamique inertielle. Parfaitement adaptés à la capture de mouvement 3D et à la mesure inertielle, ces capteurs, dont le prix est en baisse, rendent désormais les gyroscopes triples axes hautes performances accessibles à tous.
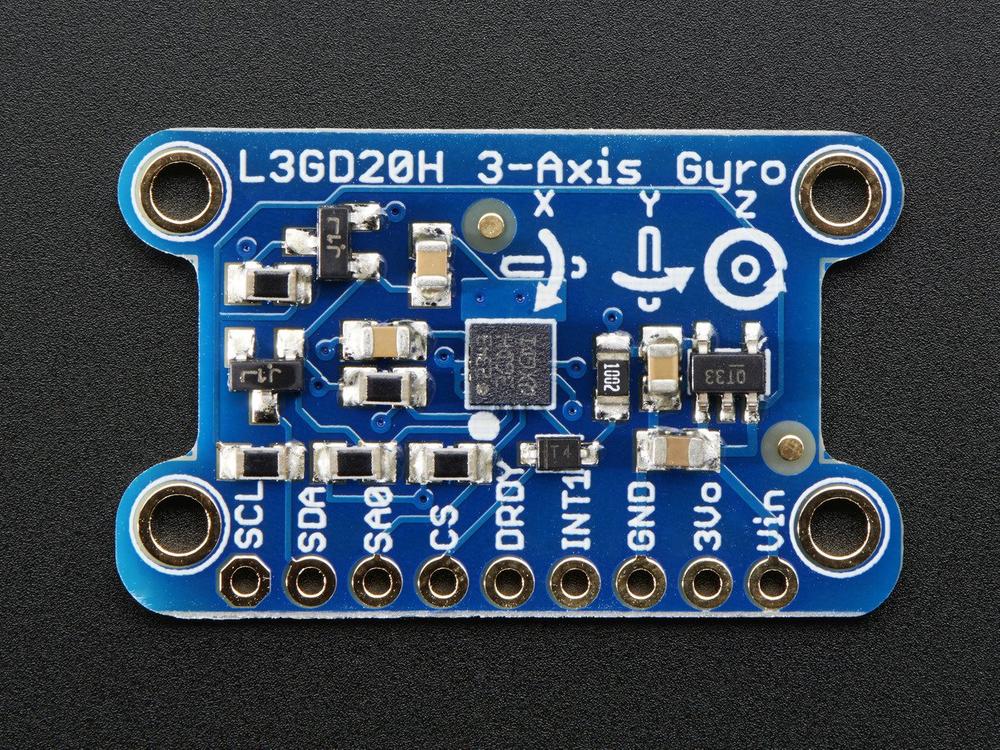
Cette carte de développement intègre la puce L3GD20H de STMicro, une version améliorée de la L3G4200, offrant trois axes de détection. Sa sensibilité est réglable de ±250, ±500 et ±2000 degrés par seconde. Des filtres passe-haut et passe-bas intégrés simplifient le traitement des données et optimisent son efficacité.
Cette puce polyvalente prend en charge les protocoles I₂C et SPI, garantissant une interaction fluide avec toute plateforme de microcontrôleur. Pour pallier les problèmes de compatibilité, la carte intègre un circuit de décalage de niveau, permettant une interaction sécurisée avec l'interface 5 V d' Arduino , ainsi qu'un régulateur 3,3 V pour les sources d'alimentation 5 V.
Conçu pour une intégration facile, le circuit imprimé est équipé de quatre trous de montage de 2,1 mm pour une fixation solide à l'aide de vis impériales n° 2-56 ou M2. L'installation rapide consiste à connecter le capteur aux broches SDA, SCL, de masse et d'alimentation d'un Arduino . La bibliothèque Arduino conviviale fournie génère les données du capteur XYZ, simplifiant ainsi vos projets.
Propriétés
| Marque | Adafruit |
| Modèle | 1032 |
Délai de livraison 10 à 12 jours ouvrables
 Adafruit Carte de dérivation gyroscopique à trois axes L3GD20H - Mise à niveau L3GD20/L3G4200 Livré en 10 à 12 jours € 19,35
Adafruit Carte de dérivation gyroscopique à trois axes L3GD20H - Mise à niveau L3GD20/L3G4200 Livré en 10 à 12 jours € 19,35 Produits similaires
- DFRobot Gravité : BNO055+BMP280 intelligent 10DOF AHRS € 36,95 Voir le produit
- Réduit En stock -50 % Sparkfun Micro 6DoF IMU Breakout - BMI270 (Qwiic) € 24,50 € 12,25 Voir le produit
- Adafruit ADXL335 - Accéléromètre à trois axes compatible 5V (+-3g sortie analogique) € 22,60 Voir le produit
- Sparkfun Triple Axis Magnétomètre Breakout - MLX90393 (Qwiic) € 29,05 Voir le produit
- Sparkfun 6 degrés de liberté - LSM6DSO (Qwiic) € 25,30 Voir le produit
- DFRobot MPU-6000/MPU-6050 : Dispositifs avancés de suivi de mouvement à 6 axes € 19,85 Voir le produit
- Pololu Gyroscope, accéléromètre et boussole MinIMU-9 v5 (support LSM6DS33 et LIS3MDL) € 47,65 Voir le produit
- Accéléromètre triple axe Adafruit LIS3DH (+-2g/4g/8g/16g) € 9,70 Voir le produit
- Accéléromètre à trois axes Sparkfun - LIS3DH € 13,15 Voir le produit
- Carte IMU Sparkfun Micro 6DoF - LSM6DSV16X (Qwiic) € 36,45 Voir le produit
- DFRobot Fermion : Capteur IMU 10 DOF – ADXL345 + ITG3205 + VCM5883L + BMP280 (Breakout) € 19,85 Voir le produit
- Adafruit 9-DOF Orientation absolue IMU Fusion Breakout - BNO055 € 48,60 Voir le produit
- Pololu Gyroscope 3 axes L3GD20H avec régulateur de tension € 26,75 Voir le produit
- Dérivation IMU Sparkfun 9DoF - ISM330DHCX, MMC5983MA (Qwiic) € 62,75 Voir le produit
- DFRobot Fermion : Capteur intelligent 9 axes BNO055 (Breakout) € 26,55 Voir le produit
- Adafruit LSM6DS3TR-C + LIS3MDL - IMU de précision à 9 degrés de liberté € 29,30 Voir le produit
- Réduit En stock -50 % Pololu LIS3MDL Support de magnétomètre 3 axes avec régulateur de tension € 20,85 € 10,45 Voir le produit
- Accéléromètre et gyroscope Adafruit LSM6DSO32 6-DoF € 19,35 Voir le produit
- Accéléromètre à trois axes Sparkfun - KX134 (Qwiic) € 50,10 Voir le produit
- Réduit En stock -50 % Sparkfun 6DoF IMU Breakout - BMI270 (Qwiic) € 25,80 € 12,90 Voir le produit
- DFRobot Accéléromètre compact à trois axes avec capteur Bosch BMA220 € 9,45 Voir le produit
- Carte de dérivation Adafruit 9-DOF Accel/Mag/Gyro+Temp - LSM9DS1 € 32,50 Voir le produit
- Sparkfun Accéléromètre LilyPad - ADXL335 € 27,30 Voir le produit
- Adafruit 9-DOF Orientation absolue IMU Fusion Breakout - BNO055 € 42,15 Voir le produit
- Baromètre numérique absolu Sparkfun - LPS28DFW (Qwiic) € 29,30 Voir le produit
- DFRobot Fermion : Capteur magnétomètre à trois axes BMM350 pour réalité augmentée/réalité virtuelle (Breakout) € 12,15 Voir le produit
- Pololu Accéléromètre 3D LSM6DS33 et support gyroscopique avec régulateur de tension € 26,75 Voir le produit
Questions et réponses
Avis des clients
- Réduit En stock -49 % Adafruit Module de rétroéclairage LED blanc - Grand 45 mm x 86 mm € 4,15 € 2,10 Voir le produit
- Réduit En stock -49 % Adafruit Module de rétroéclairage LED blanc - Petit 12 mm x 40 mm € 2,75 € 1,40 Voir le produit
- Réduit En stock -49 % Adafruit Connecteurs empilables pour Feather - Connecteurs femelles à 12 et 16 broches € 1,75 € 0,90 Voir le produit
- Réduit 3 pièces En stock -50 % Adafruit Filament LED - 3 V, 26 mm de long - Blanc chaud (lot de 3) € 6,30 € 3,15 Voir le produit
- Réduit En stock -49 % Adafruit Mini haut-parleur en métal avec fils - 8 ohm 0,5 W € 2,75 € 1,40 Voir le produit
- Réduit En stock -50 % Adafruit Filament LED flexible avec une seule connexion - 3V 25 mm de long - Vert € 3,50 € 1,75 Voir le produit
- Réduit En stock -50 % Adafruit Carte de dérivation à angle droit CMS à 2 broches JST-PH € 2,10 € 1,05 Voir le produit
- Réduit En stock -50 % Adafruit NOOds - Filament LED Flexible - 3V 300mm de long - Jaune € 10,45 € 5,25 Voir le produit
- Réduit En stock -50 % Adafruit Capteur de faisceau IR avec embouts de câble de qualité supérieure - LED 5 mm € 8,30 € 4,15 Voir le produit
- Réduit En stock -50 % Adafruit Ensemble de bobines de fil de raccordement - 22AWG toronné - 6 x 25 pi € 27,85 € 13,95 Voir le produit
- Réduit En stock -49 % Adafruit Haut-parleur - 3" de diamètre - 4 Ohm 3 Watt € 2,75 € 1,40 Voir le produit
- Réduit En stock -50 % Adafruit Ensemble d'enceintes stéréo fermées - 3W 4 Ohm € 10,50 € 5,25 Voir le produit
- Réduit En stock -50 % Carte d'extension GPS Ultimate Adafruit pour Raspberry Pi A+/B+/Pi 2/3/4/Pi 5 € 41,75 € 20,90 Voir le produit
- Réduit En stock -50 % Adafruit Jeu de câbles d'alimentation CC étanches - 5,5/2,1 mm € 3,50 € 1,75 Voir le produit
- Réduit En stock -50 % Adafruit NOOds - Filament LED Flexible - 3V 300mm de long - Rouge € 10,45 € 5,25 Voir le produit
Articles consultés récemment
- Adafruit Carte de dérivation gyroscopique à trois axes L3GD20H - Mise à niveau L3GD20/L3G4200 € 19,35 Voir le produit
- Pololu Fils avec bornes pré-serties paquet de 10 MF 12" Orange € 12,90 Voir le produit
- Pololu Fils avec bornes pré-serties paquet de 2 MF 60" noir € 11,80 Voir le produit
- Pololu Motoréducteur métal 75:1 25Dx54L mm MP 12V € 41,10 Voir le produit
- Pololu Fil de connexion Premium, paquet de 10, MF, 6 pouces, vert € 9,75 Voir le produit